
JGI Seed Corn Funding Project Blog 2022-2023: Jiao Wang and Ahmed Mohamed
1. Aim
This seed corn project aimed to identify a large sample of rainfall events that result in flooding in Great Britain and to evaluate deep learning and optical flow algorithms for radar rainfall nowcasting at the event and catchment scales.
2. Data collection
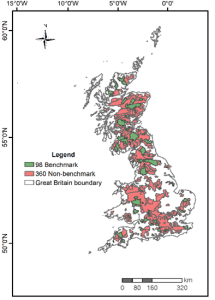
During the project, we collected hourly time series for observed rainfall and flow data over ten years across 458 catchments in Great Britain (Figure 1). Moreover, we classified these catchments based on various criteria, such as area, location, land cover types, and human activities. Meanwhile, the UK Met Office’s radar rainfall mosaic data with high resolutions in space (1 km) and in time (5 minutes), generated by the UK Met Office Nimrod system, were also collected covering Great Britain.
3. Rainfall-flooding events identification
We applied a recently developed and novel objective methodology called the DMCA-ESR method to separate rainfall-flow events for each catchment. This process yields a total of 18,360 events, encompassing a wide range of magnitudes and durations. The threshold of peak flow for each catchment was set based on flooding information derived from local government reports and previous studies. We also removed overlapping events based on predefined criteria for event occurrence and termination. Consequently, 442 rainfall events that contributed to flooding were identified. Radar data were then extracted specifically for each event based on event start and end times.
4. Deep learning and optical flow algorithms
We employed the UNet, a convolutional neural network (CNN), for rainfall nowcasting. The model was trained, evaluated, and validated using the radar data. The two-year radar data from 2018 to 2019 were split into 80% for training and 20% for evaluation. The UNet model takes the previous 12 radar rainfall frames as input to forecast the subsequent 12 frames.
Additionally, we used three optical flow methods in rainfall nowcasting, namely, SparseSD, Dense, and DenseRotation. These methods utilize the concept of motion estimation to predict the movement of rain patterns in radar images. The Eulerian persistence, which assumes that the current rainfall distribution will remain unchanged in the near future, was used as a standard baseline.
5. Evaluate rainfall nowcasting Performance
We evaluated the performance of the deep learning model and optical flow algorithms for nowcasting all 442 events in Great Britain. The accuracy of the nowcasts was assessed using two metrics: Mean Absolute Error (MAE) and the critical success index (CSI). Figure 2 illustrates the average metric results for a specific rainfall event.
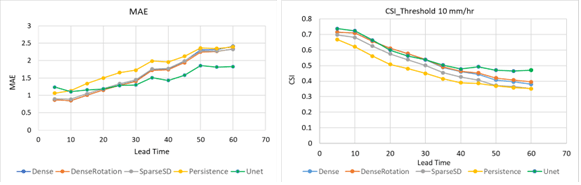
Based on Figure 2, we observe a general decline in the performance of all models as the lead time increases. The Eulerian Persistence baseline exhibits the lowest performance. Regarding the MAE, the UNet initially shows lower performance compared to the optical flow-based algorithms at the early lead times (t+5, t+10, and t+15). However, as the lead time progresses, the UNet’s advantage becomes more prominent, and it outperforms the other models at longer lead times (after t+25). SparseSD, Dense, and DenseRotation demonstrate relatively similar performance. In terms of the CSI values at a rainfall intensity threshold of 10 mm/hr, the UNet exhibits superior performance compared to the other models, except at lead times of 20 and 25, where DenseRotation slightly outperforms it. Among the optical flow-based models, DenseRotation demonstrates the best overall performance.
6. Next steps
For our upcoming steps, we have outlined the following objectives:
- Evaluate the five rainfall nowcasting models at the catchment scale.
- Compare the performance of the algorithms using information theory criteria.
- Provide a comprehensive summary that highlights any patterns or relationships between the catchment characteristics and the nowcasting model performance.
- Utilize the rainfall nowcasts for hydrological modelling and evaluation.